|
|
|
|
|
Robotic Technology Enabled Gait Training Methods: A Boon for Gait Rehabilitation in Incomplete Tetraplegia
|
|
|
|
Thangavelu Senthilvelkumar, Joy Christy, Radhakrishnan Yuvaraj, Prashanth H Chalageri, Raji Thomas Department of Physical Medicine & Rehabilitation, Christian Medical College, Vellore, Tamil Nadu, India. |
|
|
|
|
|
Corresponding Author:
|
|
Dr Thangavelu Senthilvelkumar Email: senthil@cmcvellore.ac.in |
|
|
|
|
|
|
|
|
Received:
13-AUG-2024 |
Accepted:
09-NOV-2024 |
Published Online:
25-JAN-2025 |
|
|
|
|
|
|
|
Abstract
|
|
|
|
Background: Incomplete cervical spinal cord injuries (SCI) often result in significant gait impairments, necessitating advanced rehabilitation methods to restore mobility. Robotic-assisted gait training (RAGT) and gait adaptability training are emerging as effective interventions for improving functional outcomes in individuals with such injuries. Case Report: We report the case of a 65-year-old man with a traumatic C6 incomplete cervical SCI who exhibited severe functional limitations, including the inability to stand or walk. Conventional physiotherapy for four weeks enabled him to stand with bilateral leg braces and walk with maximal support, although progress was hindered by fear of falling, poor hand grip, and weak trunk control. To accelerate rehabilitation, the patient underwent ten sessions of Lokomat Pro RAGT and ten sessions of C-Mill VR+ training over four weeks. The intervention yielded significant improvements: his Walking Index for Spinal Cord Injury (WISCI II) scale score progressed from 0 at admission to 6 with RAGT introduction and reached 20 by the end of the training period. Additionally, his Berg Balance Scale score increased to 46, reflecting improved balance and mobility. Conclusion: Robotic-assisted gait training has proven to be a valuable addition to conventional rehabilitation methods for individuals with incomplete tetraplegia. In this case, the integration of Lokomat Pro and C-Mill VR+ facilitated rapid functional recovery, underscoring the potential of robotic technologies to enhance gait rehabilitation outcomes in this population. |
|
|
|
|
|
Keywords :
|
Gait, Injuries, Physiotherapy, Rehabilitation, Robotics, Spinal Cord.
|
|
|
|
|
|
|
|
|
|
|
|
Introduction
Regaining the ability to walk is one of the most essential rehabilitation goals of people with spinal cord injury (SCI) [ 1, 2]. The most remarkable neurological recovery occurs during the initial 3-6 months post-injury. Implementing tailored and intensive task-specific training during this time, with higher repetitions and precise sensor motor feedback, can lead to swifter outcomes by harnessing the benefits of neuroplasticity [ 3]. Incorporating principles of neuroplasticity into conventional gait training can be exhaustive for therapists, especially while treating patients with incomplete tetraplegia who have poor hand function, insufficient trunk control, and weak lower extremities. To address these challenges, advanced automated electromechanical devices have been developed [ 4]. Research has demonstrated that a more significant number of task-specific repetitions can be attained with a lesser workforce and enhanced safety using Robotic and Virtual Reality Technology that incorporate principles of neuroplasticity [ 5, 6]. The Lokomat is an exoskeleton-based robotic gait training device widely used for gait rehabilitation in several neurological disorders with a positive effect. The exoskeleton can be attached to a person's lower extremities, while a body-weight support (BWS) system supports the individual's weight on a treadmill. This technology provides early, safe, efficient, intensive, gradable, and highly reproducible gait training. C-Mill VR+ is a virtual reality-based gait adaptability training that provides a safe and comfortable environment for walking and balance training with various exercise games featuring visual and auditory stimuli. It provides patients interactive and fun therapy full of enjoyable and rewarding moments to keep them immersed and motivated. We are reporting our experience of using a combined approach of robotic-assisted gait training (RAGT) using Lokomat Pro and gait adaptability training (C-Mill) alongside conventional therapy for a patient with incomplete tetraplegia.
Case Report
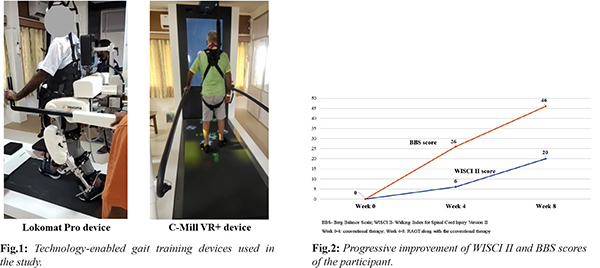
A 65-year-old patient sustained a traumatic spinal cord injury after a fall from the construction site with immediate sensory loss and paralysis of bilateral upper and lower limbs. MRI of the spine revealed disc osteophyte complex from C3-4 to C6-7 levels with moderate to severe spinal canal stenosis causing compression in the cervical spinal cord. The next day, C2 to C7 decompressive cervical laminectomy was performed and post-surgery he regained with some improvement of motor power in all four limbs. Based on the American Spinal Injury Association Impairment Scale (AIS), the patient was classified as AIS-C with the single neurological level of injury being C6. Neurorehabilitation began a week later, with the patient being bed-bound and dependent on all functional abilities. The upper extremity motor score was 16, and the lower extremity motor score was 32. He could not stand or walk, scoring 0 on the Walking Index for SCI version II [WISCI II] and Berg balance scale. During the initial four weeks, he underwent conventional physiotherapy, including strengthening of extremities, core strengthening, tone normalization, and balance training. Gait training was initiated within parallel bars with the help of two physiotherapists. Progress was slow due to several factors. Primarily, his tall stature and poor hand grip limited his ability to hold onto walking aids. At the same time, his weak trunk and lower extremity muscles made balancing challenging, increasing his fear of falling. Manual labor was physically taxing for therapists. During this period, his BBS score increased to 26, and his WISCI score improved to 6, indicating that he could walk with the help of a walker and bilateral knee gaiters. Robotic-assisted gait training (RAGT) was introduced alongside conventional therapy [Fig.1]. This involved daily gait training for 45 minutes on Lokomat Pro five times a week over two weeks, totaling ten sessions. Guidance force was reduced from 100% to 0%, and BWS was decreased from 75% to 0% based on progression. After attaining a functional ambulation category score of 3, he transitioned from Lokomat to virtual reality-based gait adaptability training on C-Mill. This phase consisted of ten augmented static and dynamic balance training sessions, lasting 30 minutes, conducted five times a week for two weeks. Clear visual objects were projected onto the treadmill belt using a high-resolution projector, providing patients with customized treatment using dozens of challenging visual cues. There was remarkable improvement in walking pattern, endurance, and balance following the inclusion of RAGT into the rehabilitation regimen. Over four weeks, his WISCI score improved to 20, indicating that he could ambulate without any braces, walking aids, or physical assistance. His Berg Balance score improved to 46. [Fig.2]. Furthermore, he could negotiate ramps, steps, irregular terrain, and obstacles.
Discussion
Integration of RAGT using a robotic exoskeleton and treadmill with virtual reality technology into conventional therapy facilitated significant improvement in walking our patient with incomplete tetraplegia. His walking ability improved from 30% (WISCI level 0-6) during the first four weeks to 70% (WISCI level 6-20) in the subsequent four weeks. Nam et al. demonstrated that Lokomat training is a promising method for enhancing locomotor ability and restoring functional walking in individuals with incomplete SCI [ 7]. RAGT offers numerous advantages over traditional rehabilitation. Traditional rehabilitation focuses on specific impairments, is therapist-driven, and involves low-intensity training with less repetition and feedback, often with passive involvement from the patient. On the other hand, RAGT is built on principles of motor learning and provides high-dose, high-intensity training. Lokomat enables patients to practice up to 1000 steps in a 30-minute session, compared to 50-100 steps in a traditional treatment [8]. It automates repetitive and labor-intensive therapy, supporting therapists and patients throughout different stages of rehabilitation. RAGT encourages perfect physiological patterns and offers a safe environment with meaningful real-time feedback. These factors promote central and spinal neuroplasticity. Individuals affected by incomplete tetraplegia with appropriate motor strength, devoid of contraindications for robotic exoskeleton use, can safely engage in walking activities with these technologies. VR-based therapy allows practicing sports, recreational or functional activities without any risk, activities whose practice could be dangerous in real scenarios [9]. A systematic review by Miguel-Rubio et al. showed that VR interventions provide potential benefits to recover balance in patients with SCI [10]. However, the feasibility of this advanced cutting-edge technology rehabilitation in low and middle-income countries is still uncertain.
Conclusion
Robotic-assisted gait training devices have revolutionized rehabilitation outcomes of individuals with incomplete tetraplegia and are value-added services for gait rehabilitation. Research is needed to determine the frequency, duration, and timing after SCI for the robotic gait training to be the most effective.
Contributors: TS: Concept & manuscript writing; JC & RY: patient management and data collection; PHC: manuscript editing; RT: critical inputs into the manuscript. TS will act as a study guarantor. All authors approved the final version of this manuscript and are responsible for all aspects of this study. Funding: None; Competing interests: None stated.
References - Simpson LA, Eng JJ, Hsieh JTC, Wolfe and the Spinal Cord Injury Rehabilitation Evidence [SCIRE] Research Team DL. The health and life priorities of individuals with spinal cord injury: A systematic review. J Neurotrauma. 2012;29(8):1548-1555.
- Ditunno PL, Patrick M, Stineman M, Ditunno JF. Who wants to walk? Preferences for recovery after SCI: a longitudinal and cross-sectional study. Spinal Cord. 2008;46(7):500-506.
- Jones ML, Evans N, Tefertiller C, Backus D, Sweatman M, Tansey K, et al. Activity-based therapy for recovery of walking in individuals with chronic spinal cord injury: results from a randomized clinical trial. Arch Phys Med Rehabil. 2014;95(12):2239-2246.e2.
- Alashram AR, Annino G, Padua E. Robot-assisted gait training in individuals with spinal cord injury: A systematic review for the clinical effectiveness of Lokomat. J Clin Neurosci off J Neurosurg Soc Australas. 2021;91:260-269.
- Mehrholz J, Thomas S, Kugler J, Pohl M, Elsner B. Electromechanical-assisted training for walking after stroke. Cochrane Database Syst Rev [Internet]. 2020;10. Available from: https://www.cochranelibrary.com/cdsr/doi/10.1002/14651858.CD006185.pub5/full. Accessed on July 5, 2024.
- Schwartz I, Meiner Z. Robotic-assisted gait training in neurological patients: who may benefit? Ann Biomed Eng. 2015;43(5):1260-1269.
- Nam KY, Kim HJ, Kwon BS, Park JW, Lee HJ, Yoo A. Robot-assisted gait training (Lokomat) improves walking function and activity in people with spinal cord injury: a systematic review. J Neuroengineering Rehabil. 2017;14(1):24.
- Stevenson AJ, Mrachacz-Kersting N, van Asseldonk E, Turner DL, Spaich EG. Spinal plasticity in robot-mediated therapy for the lower limbs. J Neuro Engineering Rehabil. 2015;12(1):81.
- Fung V, Ho A, Shaffer J, Chung E, Gomez M. Use of Nintendo Wii FitTM in the rehabilitation of outpatients following total knee replacement: a preliminary randomised controlled trial. Physiotherapy. 2012;98(3):183-188.
- Miguel-Rubio AD, Rubio MD, Salazar A, Moral-Munoz JA, Requena F, Camacho R, et al. Is virtual reality effective for balance recovery in patients with spinal cord injury? A systematic review and meta-analysis. J Clin Med. 2020;9(9):2861.
|
|
|
|
|
|
|
Search Google Scholar for
|
|
|
Article Statistics |
|
Senthilvelkumar T, Christy J, Yuvaraj R, Chalageri PH, Thomas RRobotic Technology Enabled Gait Training Methods: A Boon for Gait Rehabilitation in Incomplete Tetraplegia.JCR 2025;15:9-12 |
|
Senthilvelkumar T, Christy J, Yuvaraj R, Chalageri PH, Thomas RRobotic Technology Enabled Gait Training Methods: A Boon for Gait Rehabilitation in Incomplete Tetraplegia.JCR [serial online] 2025[cited 2025 Apr 24];15:9-12. Available from: http://www.casereports.in/articles/15/1/Robotic-Technology-Enabled-Gait-Training-Methods.html |

|
|
|
|
|